|
TwinCAT基于PC的PLC
TwinCAT是一个综合的自动控制软件包,包含工程和运行实时软件,针对于:顺序控制、运动控制、技术功能
TwinCAT基于PC平台的优点:
l 不改变Windows
l 无需专业硬件
l 将标准Windows变成实时操作系统
l 可通过OCX、Dll、.Net完全访问Windows用户界面
l 通过TCP/IP远程访问
l 周期时间短至50us、空转时间小于3us
l 可对Windows调节实时速率
l 对所有主要现场总线开放、支持PC硬件接口
l 一台PC上最多4个PLC、一个PLC上对多4个任务
l 支持所有IEC-61131-3语言(IL、ST、FBD、LD、SFC)
l 运动控制:PLCopen运动控制功能块
l 纵向集成:OPC
l 连接:现成纵向
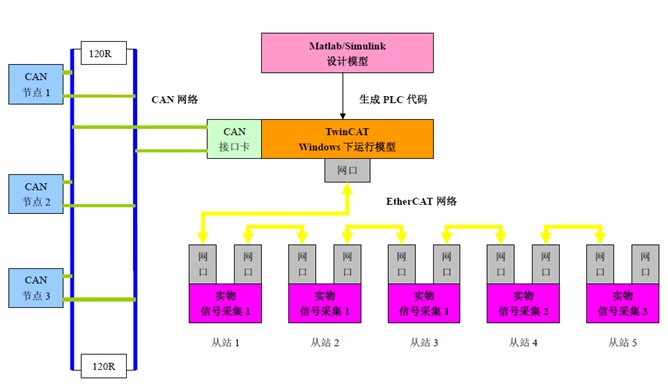
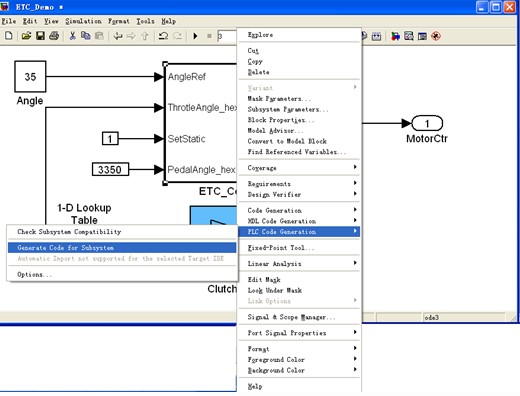
Matlab支持生成TwinCAT PLC代码
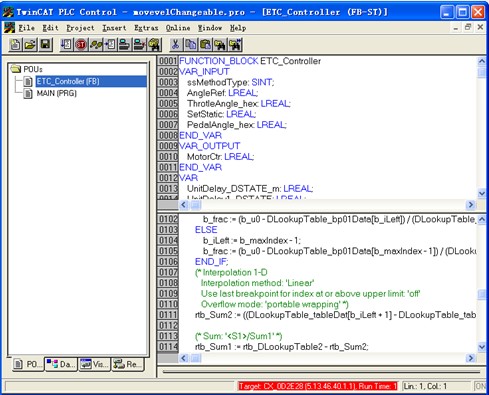
TwinCAT执行Simulink模型的PLC代码
TwinCAT下调整、检测Simulink模型参数
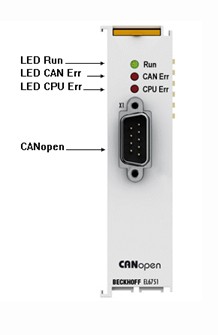
TwinCAT下的CAN网络支持——ER6751
ER6751:CANopen终端板卡主要通过EtherCAT连接,在EtherCAT的网络中集成CANopen设备。该终端板卡可以作为CANopen的主站或者从站。此外,可以接收和产生CAN信息数据,板卡内部提供了完善的协议建设。
l 支持所有的CANopen PDO通信类型:事件驱动、时间驱动、同步、轮询
l 同步于PC控制器的循环任务
l 参数通信(SDO)在运行时启动
l 报警数据处理
l 强大的参数和诊断接口
l 在线总线负载显示
l 总线监控功能
|